I decided to implement the drift task. I first decided to repeat the setup I had in the previous labs
in terms of using bluetooth to set a flag to then initialize the stunt from the jupyter lab.
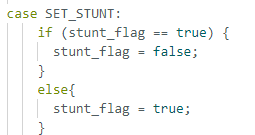
This code would set the stunt_flag to true, thus initializing the stunt. Code snippet
can be seen below.
Next I initialized global variables. This includes stunt_flag which is my flag,
stunt_value was used to keep track of where in the stunt I was, and the other
values were all used to store information in relation to the vehicle's sensors and
motor input. Declared global variables are shared below:
I was encountering an issue where I was frequently not getting new data.
So I updated my setup() function per Stephen Wagner's suggestion
in regarding handling the DMP FIFO. He added the following line to half the
speed to prevent filling his FIFO.
I modified my setup() function from the prior lab from 0 to 1.
However, I found this was insufficient at solving the problem.
As a result, one step I took to fix this was moving this line to within my stunt_s2() function which I detail later.
This did a better job and I was able to more consistently get new values from the DMP.
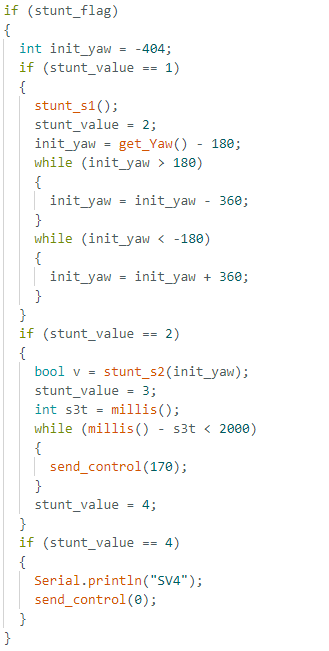
My stunt flag broke down the code into 4 components:
Part 1 was responsible for going up to a certain distance (914 mm) to the wall,
it called helper function stunt_s1() which will be shared below and runs it
until it gets within that distance, After which it updates the stunt_value,
and gets the target Yaw which is 180 degrees off of what the current yaw is
and then updates it so that it falls within the range [-180, 180].
Then it goes into step 2 which is the turning part where it will call stunt_s2
and turn until within a threshold of the desired rotation (180 degrees of the initial Yaw) before updating.
Then step 3 just applies a constant control of 170 to move forward for 2 seconds,
before entering step 4 which stops the vehicle.
I originally had each of the stunts separately, and they would trigger the other.
However, I found it better to just do them consecutively within one if statement.
Hence why you can see that step 2 and step 3 eventually got combined into
the same if statement despite step 2 being completed within function stunt_s2()
and step 3 being completed right below it.
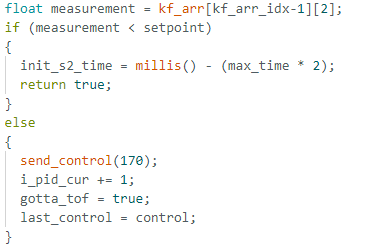
Stunt_s1() was effectively copied from the Kalman Filter Lab 7, using the Kalman Filter to measure distance from the wall.
For more details on implementation check the Lab 7 writeup. The changes to it were as follows:
As long as the kalman filter expected a measurement greater than 914 then it would always
send the same control of 170. This is in contrast to how before the input speed was impacted by using PID with
the measurement. If the measurement was less than the setpoint then it would break out of the loop to go to the next stage.
The differences from the prior lab are visible below:
Stunt_s2() was effectively the same as Lab 6's Orientation PID control with a few changes:
First of all, i_pid_cur (my index for pid arrays) was reset to 0 at the top of the function
to prevent stunt_s1 from impacting stunt_s2,
since it won't look at prior pid data.
Since I was overwriting prior data here was fine, I created a new array to save the IMU data which is detailed below.
Furthermore, Stephen Wagner's suggestion for the DMP to handle the FIFO buffer was implemented.
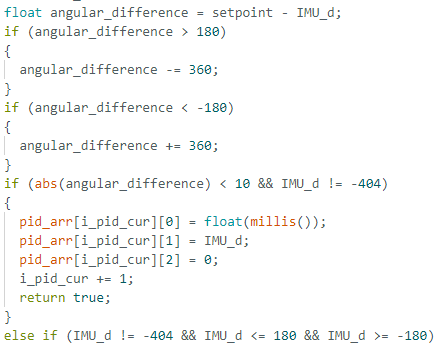
Second of all, I fixed how I determined whether the car was within range of the desired rotation.
Reasoning for this is shared beneath the code snippets.
These changes are visible below.
The if statement using angular difference was modified to now allow for it to take into account
if the current DMP value is -179 and the desired is 179. Before it was only taking the difference
making it difficult for values around the edges of the boundaries.
I found threshold for stopping rotation to be optimal between 5-10 degrees. The smaller you made it, the more
accurate the desired routing would be but also the chance of overshooting the target
and just spinning in place increased while a higher value decreased the accuracy
but made it converge to a point faster.
Data Stored And Reasoning
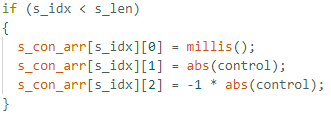
The motor input data was stored throughout the
exercise by adding to my send_control & send_control6 function (these functions are used to
send the signals to the drive motors to move the car
forward and back and other to change its orientation respectively), the following code:
Because of the way that my motors are wired, to go forward one side needs
to be negative and the other side would be positive.
Hence, in the above example
the -1 * control is added to indicate direction.
In the backward case, the signs would flip and for the turns the motors would have
the same signs.
In addition, Kalman Filter data was saved,
but only for Step 1 since that is the only step I used it for.
This data was saved and transfered the same way as detailed in Lab 7.
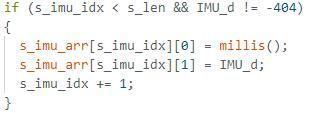
Furthermore, IMU DMP data is saved but only
during Step 2, because that is the only part of the code where
I am actively calling the DMP function to get the yaw and have the speed updated
per Stephen Wagner's suggestion to maintain accurate values.
The code snippet where it's saved is shared below. I had to implement a new
array here, because as mentioned above, I overwrite the data in the pid_array
to prevent step 1 from impacting step 2.
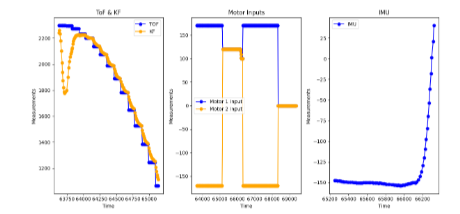
All this data, will be shared for each of the runs
seen.
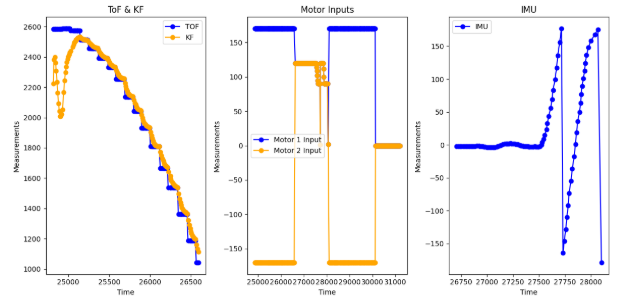
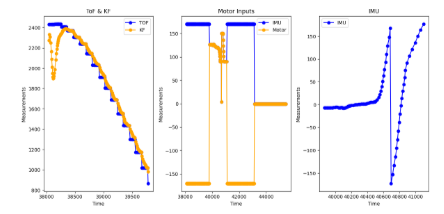
The Runs
Some interesting observations I made is that a lower threshold
would lead for the car to spin more since the car would occasionally
overshoot the measurement until it found a new one. A higher threshold
made it spin faster but the end angle would be slightly less precise.
A measurement between 5-10 degrees of the initial measured yaw was desired.
Also, the third chart IMU data was pretty interesting since it seems like it only
rotated once but the visual indicates otherwise.
Another interesting thing was my Kalman Filter being fairly off initially
before determining the desired position. I still think using the Kalman Filter,
is better than omitting it since a single poor ToF reading under the threshold
could trigger step 2 and cause the car to just spin in place randomly.
However, given this Kalman Filter initialization, if initialized close to the desired threshold
to start the rotation could cause it to rotate prematurely. Changing initial Kalman Filter values
and retuning them could help alleviate this problem, but it was unnecessary to get the drift working in this lab.
The top issues I had to fix was the following:
Fixing it so that the desired orientation could be
detected over the (-180, 180) threshold. I.e. -179 is only two degrees off from 179.
I had an issue occur because of how I initially tried handling where both it would either
just spin in place or it would freeze and wait to time out when it reached the threshold.
The freezing can be seen in my blooper below.
Adjusting the degrees threshold so that it wouldn't overshoot repeatedly
and continuously spin but also was narrow enough to get the desired orientation to go back on.
My blooper is as follows: Watch until the very end.