The task at hand is localization.
To do this we will be implementing Bayes Filter Localization which
creates discrete space and estimates the probability that the robot is in those
spaces based off of observations in space. I'll be detailing its implementation later
in this lab.
Localization in Sim
Compute Control
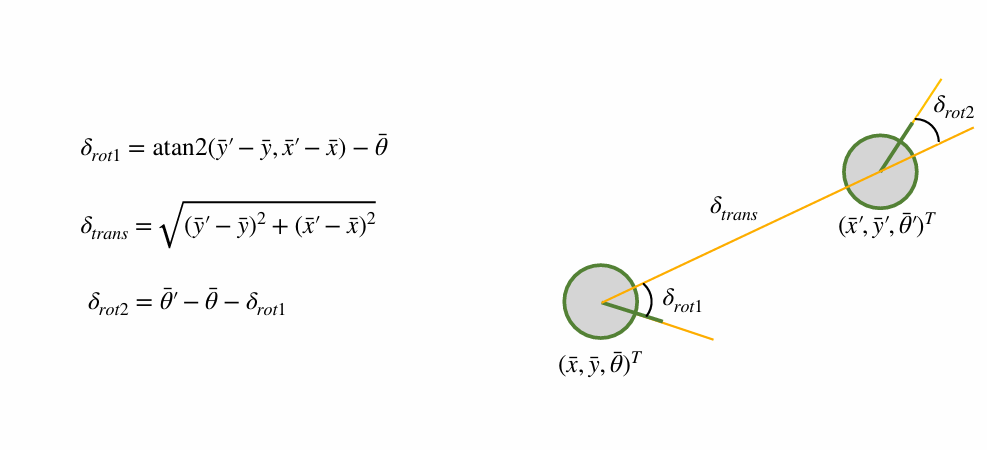
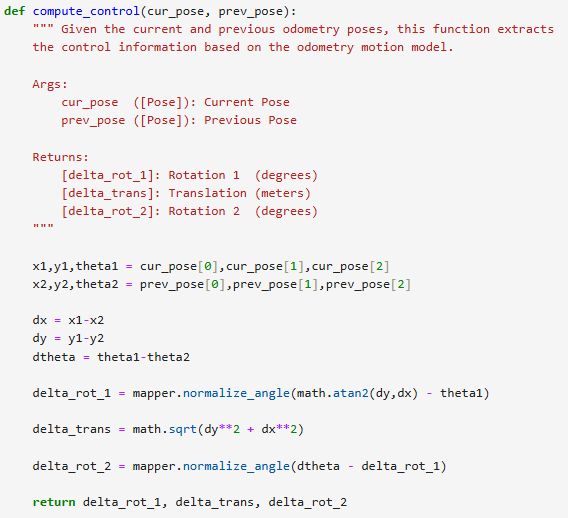
The first function which I had to implement for localization was compute_control.
This function took in the current pose and the previous pose and estimated the control
information based on the odometry motion model.
I modeled my function off of the above equations shared in lab.
Their implementation for the compute_control function is shared below.
Odom Motion Model
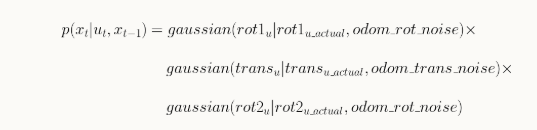
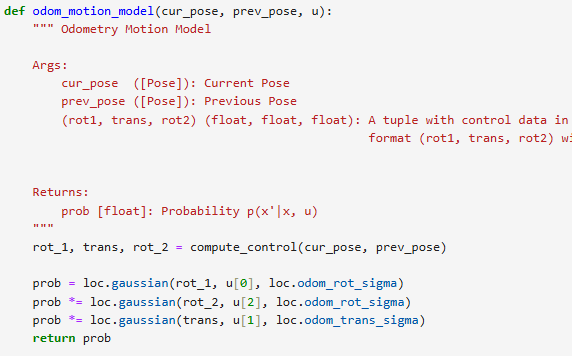
Next I had to implement the odom_motion_model function.
This function took in the current pose, previous pose, and the control data,
and returns the probability of the new pose given the prior pose and control.
For this function, I used the following information in the lab docs to model my function:
My implementation can be seen as follows:
Prediction Step
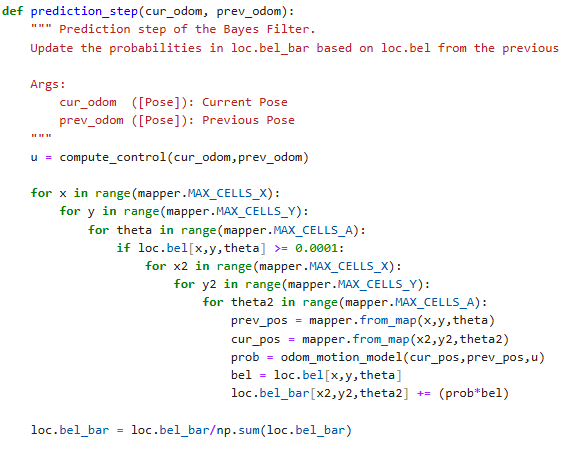
Next, I had to implement the prediction step.
To do this, I got the computed control from the compute control function and then
using all the current poses and previous poses I computed the probability of the
odomotry motion model given those poses and the control. Then I updated the beliefs
and normalized them at the end of the function. This was done to update the
probabilities in loc.bel_bar based on the previous time step and motion model.
The implementation can be seen below.
I originally had some trouble with the implementation of this. I had originally
accidently set both the cur_pos and prev_pos to the same values
and this caused the updates of the bayes grid on the map to not
be visualized. However, I soon discovered my error and correctly
separated the two poses.
Sensor Model
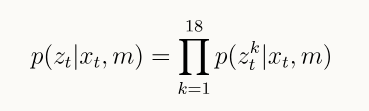
The next function I needed to implement was the sensor model.
This function took in all the observations and estimated the probabilities of each
sensor measurement given the robot pose. The below equation is used to find the
likelihood of the 18 measurements given a state.
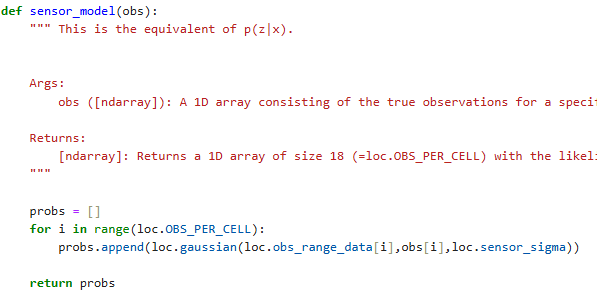
As one can see in my implementation below, the sensor_model function
returns probs which is an array of size loc.OBS_PER_CELLS per the returns
statement. For each i it checks the true observation versus the expected observation
along with the associated sigma to determine its probability before adding the
probability to the final output array.
Update Step
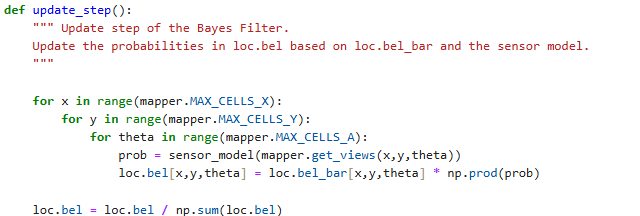
The last function that needs to be implemented is the update_step function.
This function updates the probabilities in loc.bel based on loc.bel_bar and the sensor model.
The function gets the current state and retrieves the sensor model and updates the belief.
It then is normalized to provide an estimation of the robot's position.
The Runs
Here I share videos of both of my runs. Green is the ground truth, blue is the belief, and red is the odometry.
The distribution is mapped as a grid. Generally, the belief is pretty accurate and follows the ground truth roughly accurately.
The odometry however, is a lot less accurate. This makes sense since the errors will compound with time until the estimation
is worthless. While the belief was pretty good, the bayes map generally followed it accurately and
displayed the general region of the true pose accurately. However, it wasn't always precise
on the exact location of the robot. I found that it was most accurate at the beginning and end of the trajectory
but when it was closest to the wall the accurate diminished slightly. This could be because there are a lot of similar
states that could be captured with the same distance to the nearest walls while when in the center of the map the
states are more unique in their expected measurements.