Setting Up Base Code and Running Through Lab11_sim.pynb
First, I followed the steps and copied the lab11_sim.ipynb, lab11_real.ipynb, localization_extras.py,
and all the necessary Bluetooth modules into the correct folders as outlined in the lab.
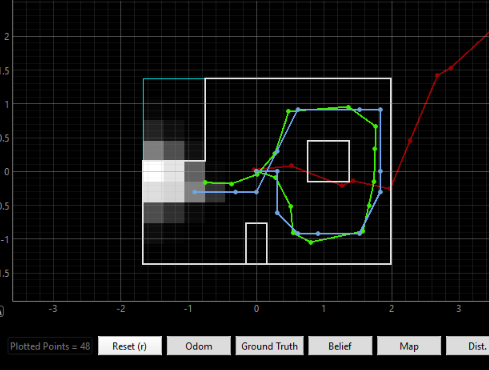
After doing this, I tested the localization in simulation and got a screenshot
of the final data. This screenshot is attached below.
Putting It On Real
Implementation on the Real Robot
Next, I had to go through implementing it on the real robot.
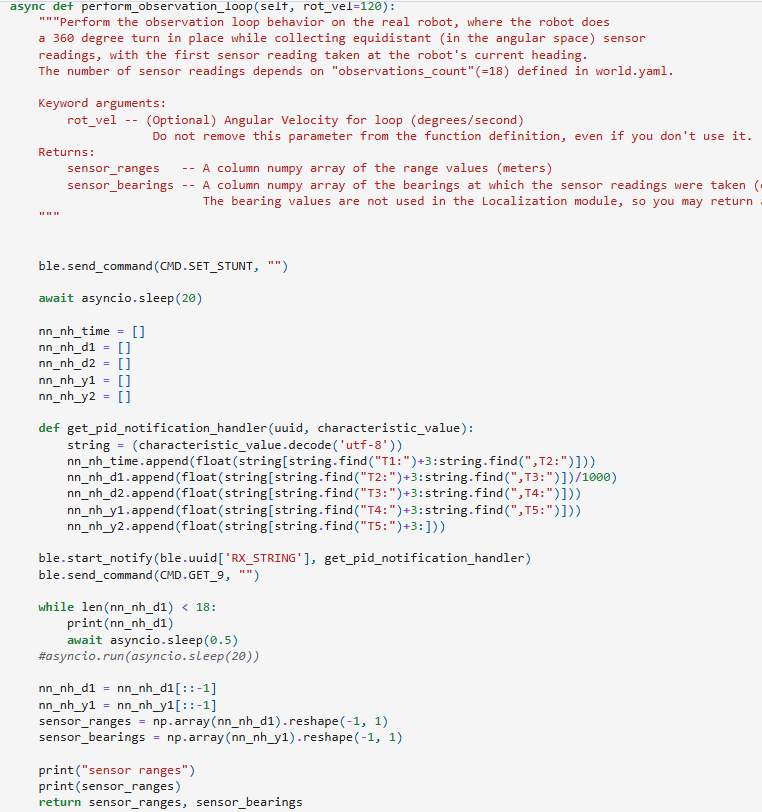
To do this, I had to implement the function perform_observation_loop.
This code is visualized and explained below.
For this function, I repurposed a lot of code from earlier.
I use the ble commands CMD.SET_STUNT and CMD.GET_9 which was implemented
and detailed in lab 9. As a short reminder, SET_STUNT is used to turn the car
in a circle and collect data points for both ToF sensors and GET_9 is used
to send the data to the notification handler.
In the notification handler, the only data we really care about is
nn_nh_d1 as this is the ToF measurements of the first ToF sensor. We divide it
by 1000 to get the data in meters.
Then we implemented a while loop to wait until all 18
observations were found and then after reverse the list
and reshape it to be a column vector.
The reason for the reshaping is that my
control function was moving my vehicle clockwise but the
output expects the measurements in counterclockwise movement.
I tried changing my control function but found it more effective
to just flip the data here especially given severe time constraints
that I had which I go into detail later when I cover the Windows v. Mac
issue. This solution ended up working perfectly as will be seen in my results
section.
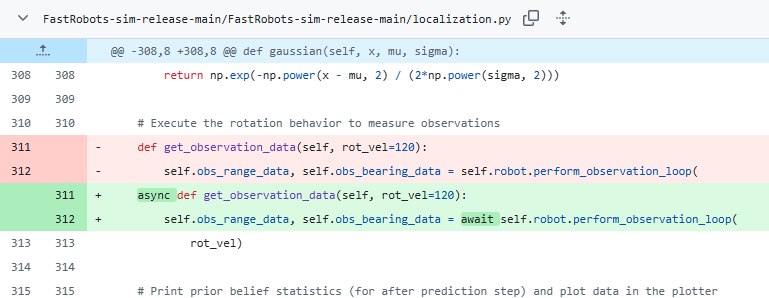
Besides that function, I also needed to add async and await elsewhere to
get it to work. Below, I share where I add it.
After this the only other changes I needed to make was to update
my rotations to be in increments of 20 to just collect 18 data points per sensor.
Before, I was collecting much more data than that. The changes to the control are shared below.
The only other change besides that, was decreasing my global array size that send values to the BLE
to 18.
Details About My Nightmare
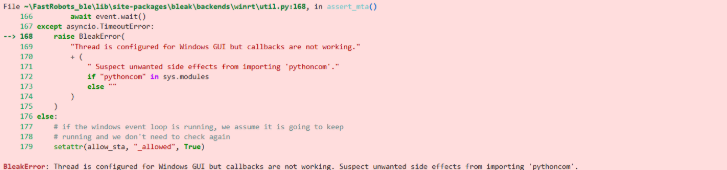
A huge issue that came up during this lab was a very long error
message that came up. Since the total message is too long to share, I
share the end below and the error message can also be referenced in Ed Post #222.
Asking ChatGPT about what was causing this bug revealed that
this issue was specifically caused by using Windows + Jupyter Notebook +
pythoncom. Asking around, everyone who completed the lab was using a Mac
and no one around me with a Windows like I did managed to get very far at this point.
After spending hours debugging, I was unable to find a fix mainly because
I was concerned with breaking some of the important dependencies. As a result,
I decided to borrow a Mac from the Library.
Unfortunately, that borrowed Mac also was unable to do the job.
This is because I needed administrator access to make some of the installations
I needed to make and the University Mac's didn't give me that access.
As a result, I asked a friend to borrow their Mac and since they weren't a
CS major, I set up everything from scratch including installing developer tools
and python to be able to test my code.
Fortunately, I was able to get it working
within those 3 hours by setting things up correctly in theory
and pushing to github.
Given I had implemented most of the code
correctly prior to to getting the computer,
I still had to make split second decisions given I only had 3
hours to collect data.
One of these decisions was choosing to
reverse my collected data instead of reversing my
control direction as reversing the control was causing
bugs I was afraid I wouldn't have time to debug.
Another one was as seen later, I only ended up plotting the
beliefs in the chart. However, I made sure to record what the
belief was in terms of values so that I could later check the
distance against the true position.
In all, I hope this details some of the limitations I faced
purely because of my OS. I never encountered the same
bug on Mac despite using the same code base. Now onto the results!
Results
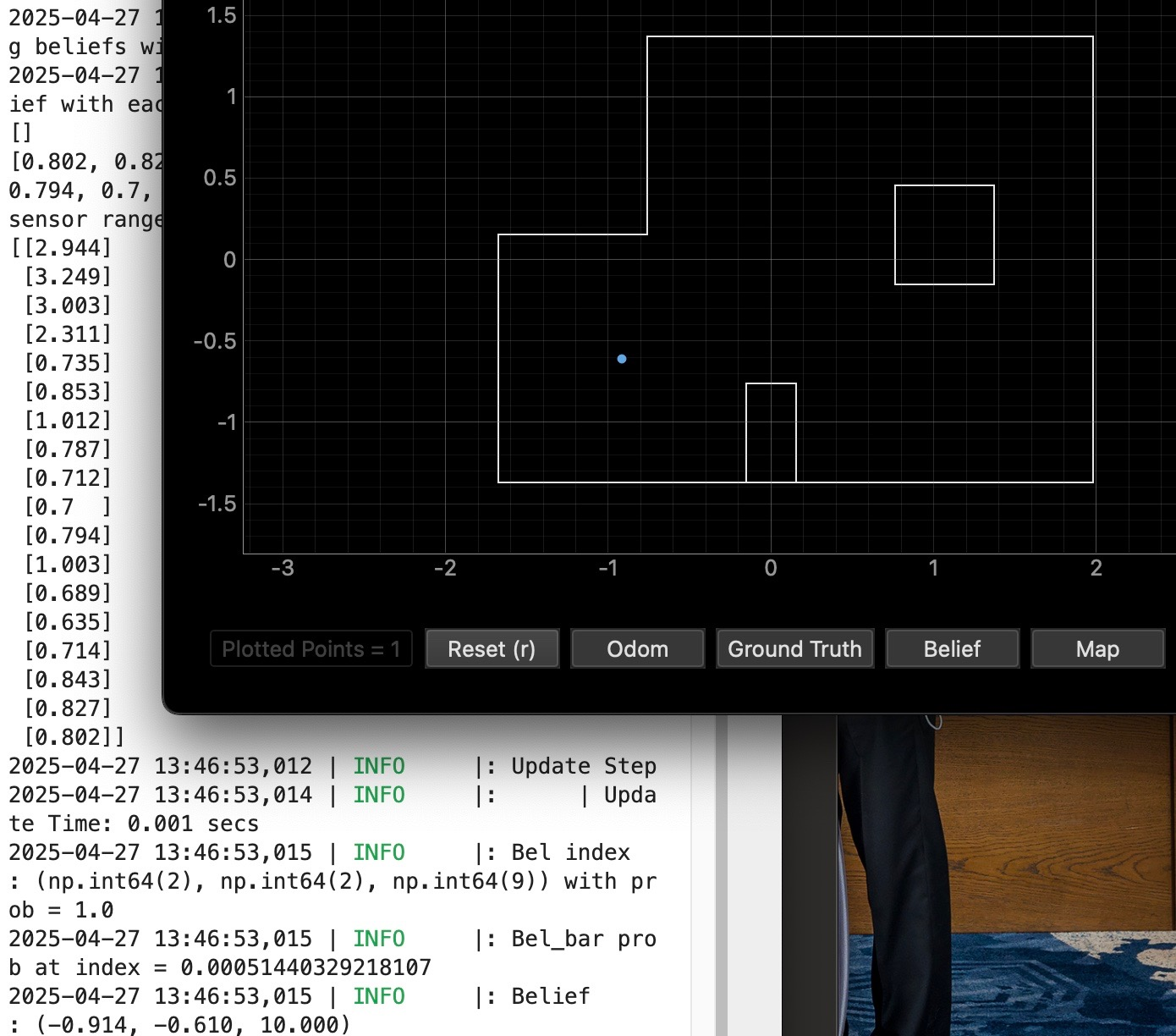
(-3 ft, -2ft, 0 deg)
In this image, we can see the belief of the datapoint
is (-.914, -.610, 10). Converting from ft to meters
we get (-.9144, -.6096, 0). The inaccuracy can be attributed
to a rounding error for the raw coordinates. The degrees are
10 degrees off, the reason for this is explained below.
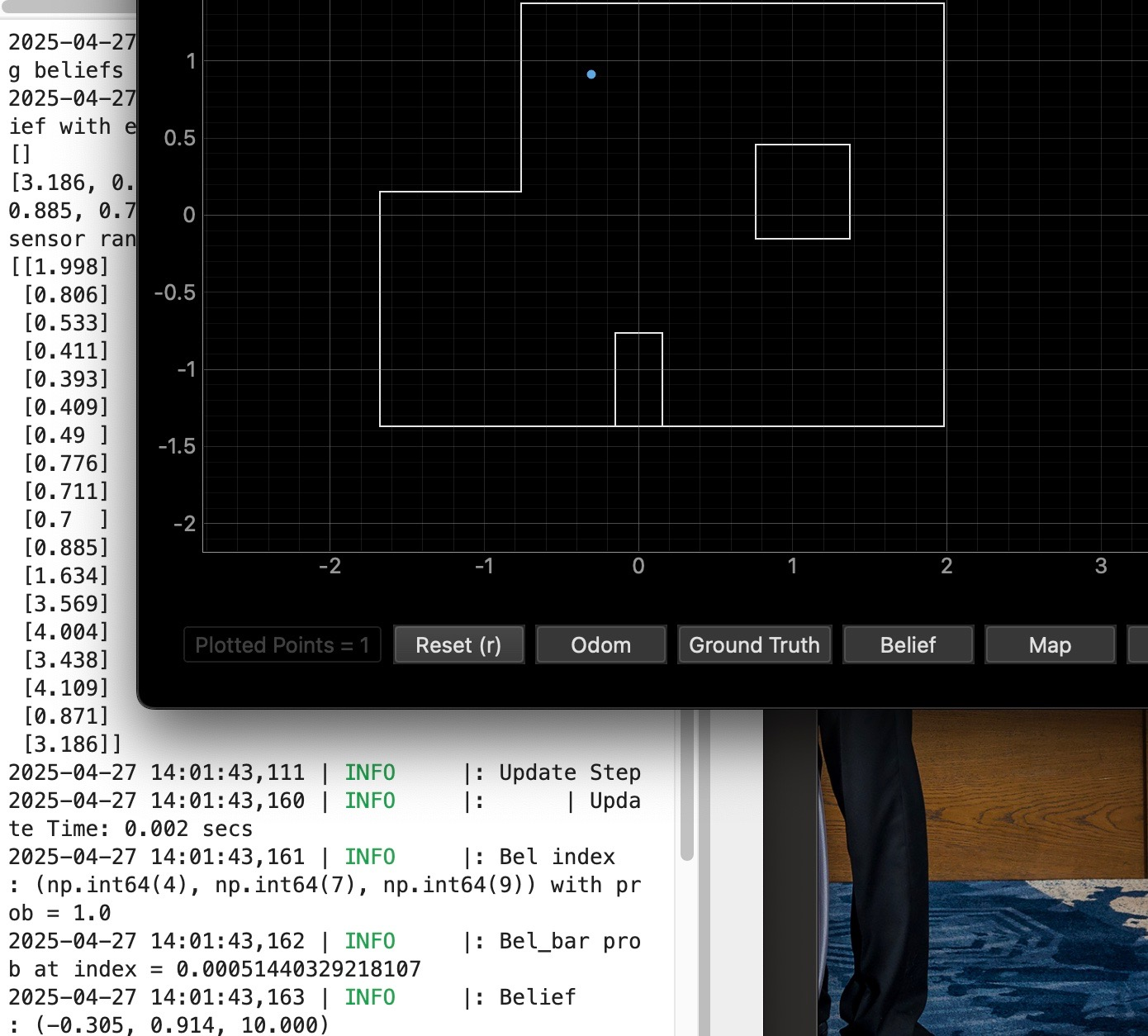
(0 ft, 3 ft, 0 deg)
In this image, we can see the belief of the datapoint
is (-.305, .914, 10). Converting from ft to meters
we get (0, 0.9144, 0). We then compute the distance and get
a distance of .305m. This distance is larger than that of
the above example, but still highly accurate. The inaccuracy
in degrees remains the same.
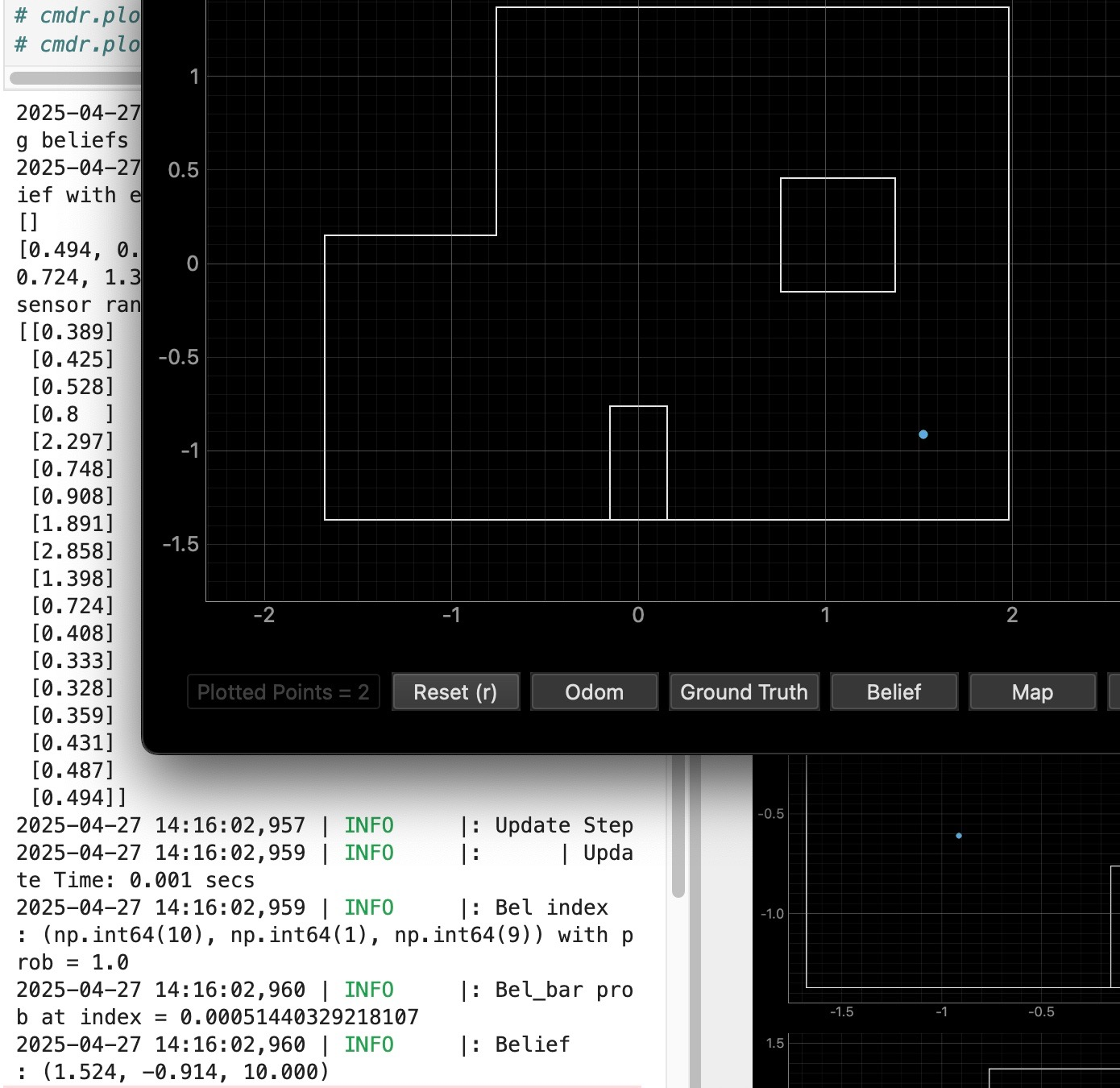
(5 ft, -3 ft, 0 deg)
In this image, we can see the belief of the datapoint
is (1.524, -.914, 10). Converting from ft to meters
we get (1.524, -.9144, 10). The difference between
these two measurements is equivalent to a rounding error,
meaning our localization is accurate. We observe the same
thing in regards to degrees as in the prior points.
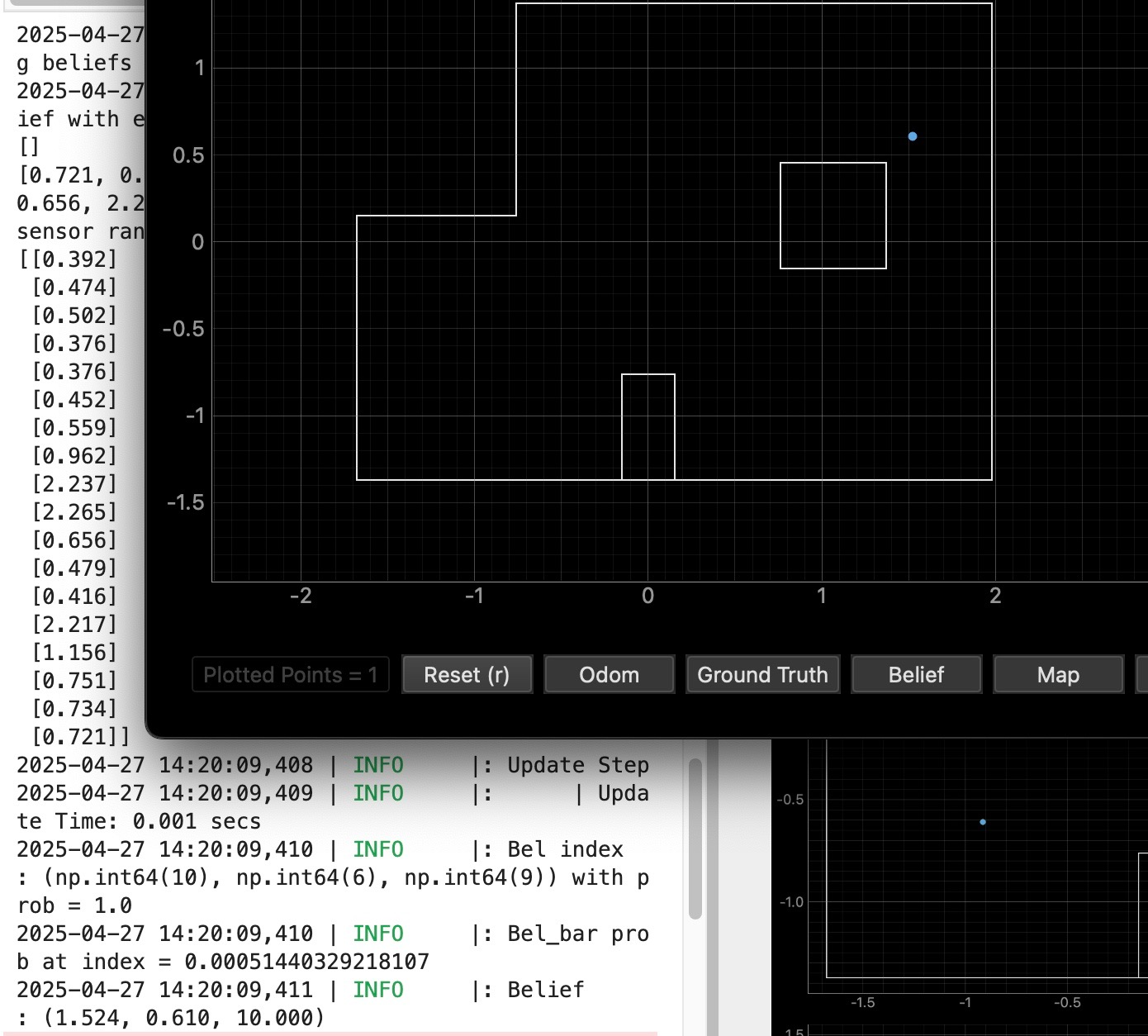
(5 ft, 3 ft, 0 deg)
In this image, we can see the belief of the datapoint
is (1.524, .610, 10). Converting from ft to meters
we get (1.524, .9144, 0). The distance between these two
points is .304m which is very similar to the second datapoint
we measured. Again we observe a 10 degree offset.
Overall Remarks
One very interesting thing is that the estimation consistently stated that
the robot was placed at 10 degrees. This is likely because in my
PID control, I set my first desired measurement at 20 degrees off from
my initial yaw. However, my threshold for being in the right space is 10 degrees.
So what likely occured is that the first measurement happened 10 degrees from my
initial yaw and every measurement after was 20 degrees off from that since thats
when it reached 10 degrees to my desired yaw. As a result, the 10 degrees
offset is expected.
In terms of how well the localization occured. The bottom two points were
absolutely precise with the only error occuring because of rounding of the belief.
However, the two top points were off by basically the same distance (.305m).
Still this offset is pretty small and I think is likely can just be attributed to
imperfect human placement and rotation of the robot given how small the offset is.
At no point was the localization terrible.